누리로봇 프로토콜
누리로봇 제어 프로토콜 메뉴얼
적용대상: 누리로봇 RS485 기반 제어기 / 액추에이터 전 제품군
1. 문서개요
1.1 목적
RS485 기반 누리로봇 제품 제어를 위한 통신 프로토콜을 명확히 이해하고 적용할 수 있도록 구조, 명령 체계, 피드백 구조를 정의한다.
1.2 적용 범위
본 문서는 아래 제품에 공통적으로 적용된다.
- BLDC 모터 컨트롤러(RS485 통신)
BCA3508
BCA3516
BCA3516E
BCA5008
BCA5016
BCA5016E
- DC 모터 컨트롤러(RS485 통신)
DCA3508
DCA5008
- 스마트모터(RS485 통신)
- SA 모터군
SA59
SA70
SA84
SA112
- SB 모터군
SB60
- SC 모터군
SC70(SM70)
2. 시스템 구성(System Architecture)
2.1 통신 개요
RS485 Half-Duplex
Data bit: 8bit / Stop bit: 1bit / Parity: None
Baudrate: 1,200 ~ 1,000,000bps (출고 기본값: 9600bps)
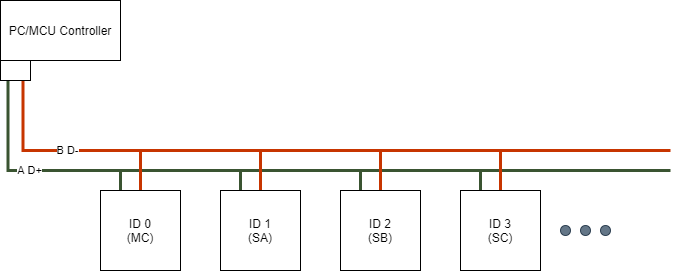
통신 구조: 1:N Master–Slave
2.2 네트워크 구성 예시
구성 예시